

 This part goal’s is to permit the two axis to move in order to make the frame hold the fabric under the sewing area so that the pattern can be embroidered in.
This part goal’s is to permit the two axis to move in order to make the frame hold the fabric under the sewing area so that the pattern can be embroidered in.
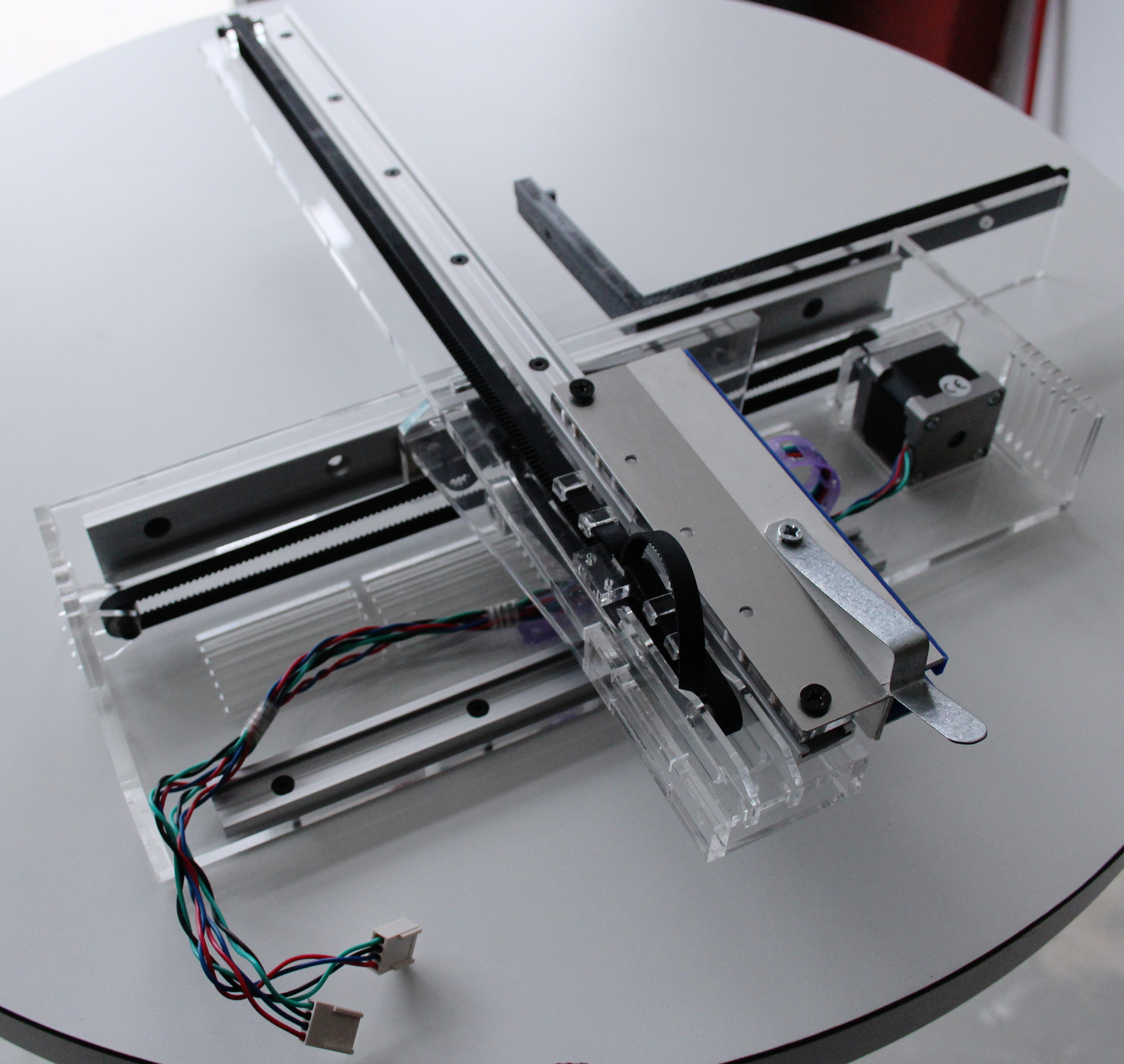
The mechanic is quite simple:
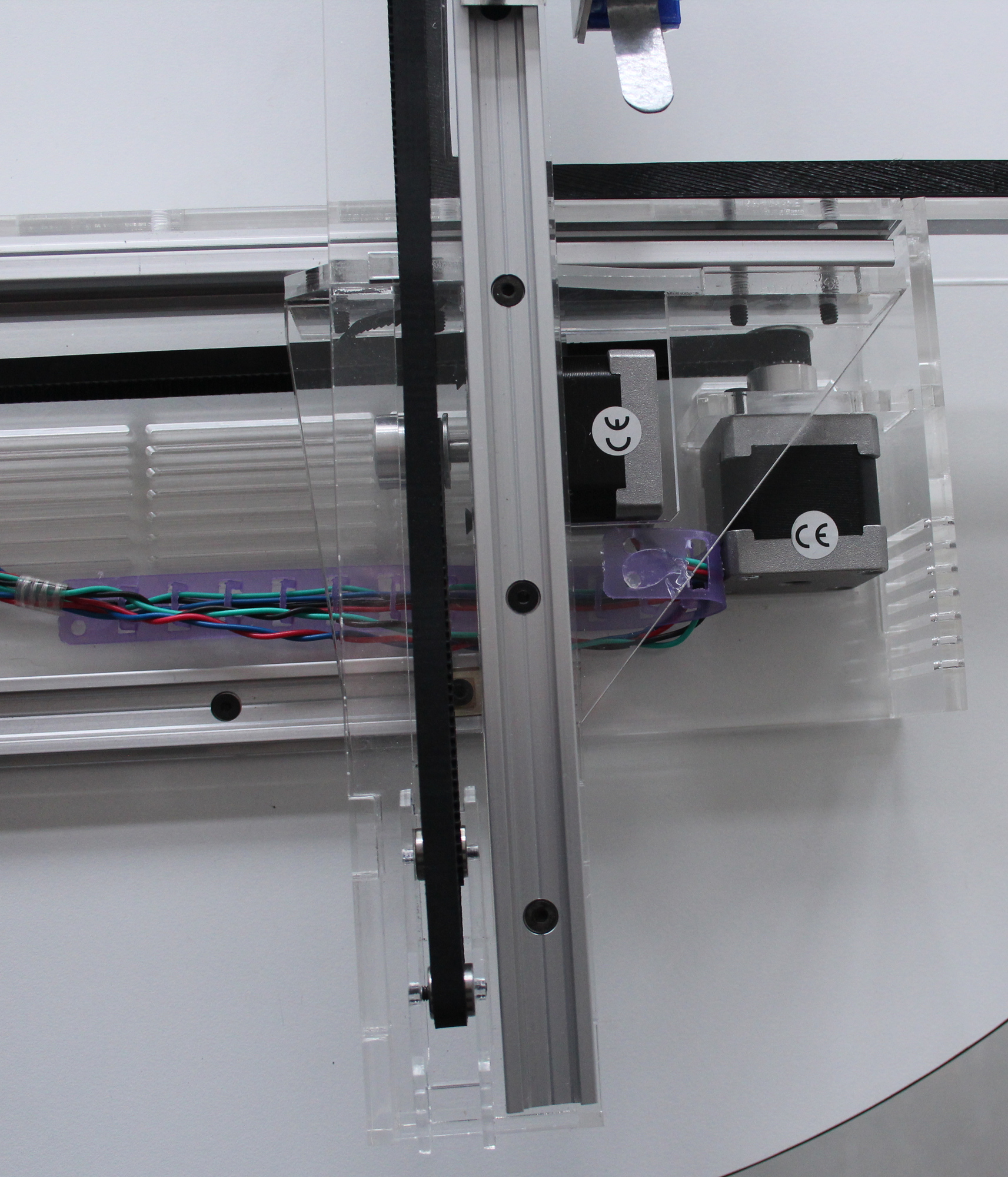
The engine of axis X leads via a strap the axis hence the whole system.
The two axis are guided by industrial rails (3out2 patin de guidage for axis X and 2 for the Y)
The chariot on the axis holds a converter allowing to put different types of frames.

We were forced by the standard heights of sewing machines (5 cm top down, lengths of the attaches of the frame)and the the wish we have to adapt our model to rethink our mechanic, it needed to be compact and it wouldn’t stop the axis movements ( in the idea to build a version with much bigger frames).
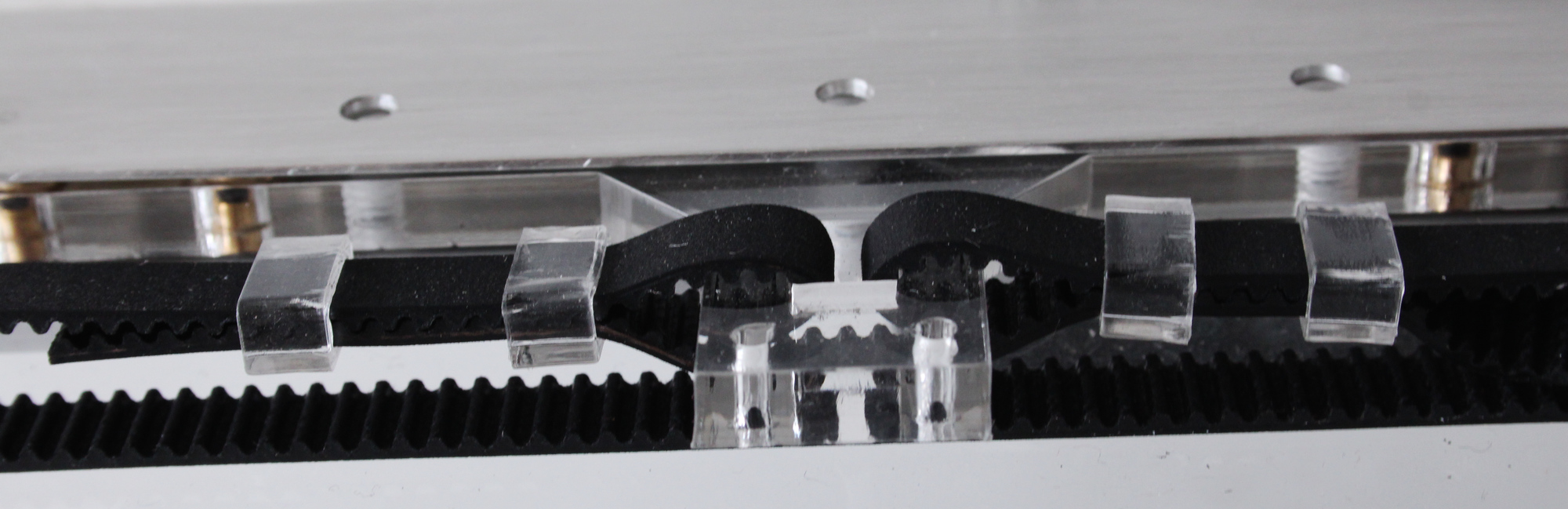 For the drive we choose small stepper engines to the format NEMA14, fed by 12V (0.8A max),and GT2 straps wide of 6mm.
For the drive we choose small stepper engines to the format NEMA14, fed by 12V (0.8A max),and GT2 straps wide of 6mm.
And igus drylin® rails in charge of guiding.
On the model we are working on we have a rail of 19cm by 17mm and another of 30 cm by 27mm for the X axis and on rail of 42cm by 17 for the axis which gives use a useful move of 16cm for X axis and 27 cm for axis.
The useful movement on the X axis is no matter what regulated by the lenght of the arm of he sewing machine.
The full mechanics of version 2 and 3 were created on the open source software Blender.
The constraints we set us forbade us to use any heavy manufacturing we have in he Lab. he 3D print and laser are however easy accesed machines everywhere , they are our two main tools for our project.
the structure is almost entirely made in PMMA (plexiglass)with a 5 cm of thickness some small pieces are only 2 mm).
As for the rest it is screwed ( M3 et M4 screws): fixated by rails engines retaining screws, (some holes had to be tapped in the PMMA).
The assemble is simple and demands no technical knowledge of any kind. It requires a special glue (available in any home depot)holding it with an elastic or a clamp.